Moteur de soupape: principe de fonctionnement et circuit
Afin de résoudre les tâches de contrôlesystèmes de précision modernes, le moteur de soupape est de plus en plus utilisé. Ceci se caractérise par un grand avantage de tels dispositifs, ainsi que par la formation active des capacités de calcul de la microélectronique. Comme vous le savez, ils peuvent fournir une haute densité de couple à long terme et d'efficacité énergétique en comparaison avec d'autres types de moteurs.
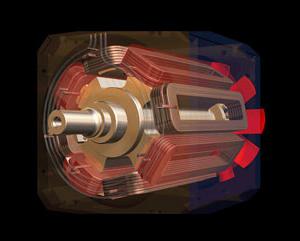
Diagramme du moteur de la vanne

Le moteur est composé des pièces suivantes:
1. Retour de l'affaire.
2. Stator.
3. Roulement.
4. Disque magnétique (rotor).
5. Roulement.
6. Stator avec enroulement.
7. Avant du corps.
Le moteur de soupape a une relation entreenroulement multiphase du stator et du rotor. Ils ont des aimants permanents et un capteur de position intégré. La commutation de l'appareil est réalisée à l'aide d'un convertisseur de soupape, à la suite duquel il a reçu un tel nom.
Le schéma du moteur du ventilateur se compose d'un arrièrecouvercle et capteur PCB, douille de palier, arbre et palier, aimants de rotor, bague isolante, enroulement, roue à ressort, manchon intermédiaire, capteur Hall, isolation, boîtier et fils.
Si les enroulements sont connectés avec une "étoile", l'appareila de grands moments constants, donc cet ensemble est utilisé pour contrôler les axes. Dans le cas de la fixation des enroulements avec un "triangle", ils peuvent être utilisés pour travailler à haute vitesse. Dans la plupart des cas, le nombre de paires de pôles est calculée en nombre d'aimants de rotor qui aident à déterminer le rapport entre les révolutions électriques et mécaniques.
Le stator peut être fabriqué avec un non-fer ounoyau de fer. L'utilisation de ces constructions pour le premier mode de réalisation, il est possible de garantir l'absence de l'attraction des aimants de rotor, mais dans cet instant, réduit de 20% le rendement du moteur en raison de la valeur réduite du couple constant.

On peut voir à partir du circuit que dans le stator, le courant est formé dans les enroulements, et dans le rotor, il est créé au moyen d'aimants permanents à haute énergie.
Légende
- VT1-VT7 - communicateurs à transistors;
- A, B, C - phases des enroulements;
- M - le moment du moteur;
- DR - capteur de position du rotor;
- Régulateur de tension d'alimentation en U;
- S (sud), N (nord) - la direction de l'aimant;
- UZ - convertisseur de fréquence;
- BR - capteur de vitesse;
- VD - diode zener;
- L - bobine d'inductance.
Le diagramme du moteur montre que l'un des principauxLes avantages du rotor dans lequel sont installés les aimants permanents sont la réduction de son diamètre et, par conséquent, la réduction du moment d'inertie. De tels dispositifs peuvent être intégrés dans l'appareil lui-même ou situés sur sa surface. La réduction de cet indicateur conduit très souvent à de faibles valeurs de l'équilibre du moment d'inertie du moteur lui-même et de la charge appliquée à son arbre, ce qui complique le fonctionnement de l'entraînement. Pour cette raison, les fabricants peuvent offrir une norme et une augmentation de 2-4 fois le moment d'inertie.
Principes de travail

Aujourd'hui, il devient très populairemoteur de vanne, le principe de fonctionnement est basé sur le fait que le contrôleur de dispositif commence à commuter les enroulements du stator. En raison de ce vecteur de champ magnétique est toujours décalé d'un angle approchant 900 (-900) par rapport au rotor. Le dispositif de commande est conçu pour la commande de courant qui se déplace à travers les enroulements du moteur, y compris la grandeur du champ magnétique du stator. Par conséquent, il est possible de régler l'heure, ce qui affecte l'appareil. Indicateur angle entre les vecteurs peut déterminer le sens de rotation qui agit sur elle.
Il devrait être pris en compte que nous parlons de l'électricitédegrés (ils sont beaucoup plus petits que ceux géométriques). Pour un exemple, donnons un calcul d'un moteur de soupape avec un rotor, qui a 3 paires de pôles en soi. Ensuite, son angle optimal est 900/3 = 300. Ces couples fournissent 6 phases des enroulements de commutation, il s'avère alors que le vecteur du stator peut passer par des sauts à 600. On voit que l'angle réel entre les vecteurs variera nécessairement de 600 à 1200, en commençant par la rotation du rotor.
Le moteur de la soupape, dont le principe de fonctionnementest basé sur la révolution des phases de commutation, à cause de laquelle le flux d'excitation est maintenu par un mouvement relativement constant de l'induit, après leur interaction, un couple de rotation commence à se former. Il aspire à faire tourner le rotor de telle sorte que tous les courants d'excitation et d'ancrage coïncident. Mais pendant son tour, le capteur commence à commuter les enroulements, et le flux passe à l'étape suivante. À ce stade, le vecteur résultant se déplace, mais reste complètement immobile par rapport à l'écoulement du rotor, ce qui créera éventuellement le couple de l'arbre.
Avantages
En utilisant le moteur de soupape en fonctionnement, il est possible de noter ses avantages:
- la possibilité d'appliquer une large gamme pour modifier la vitesse de rotation;
- haute dynamique et vitesse;
- précision de positionnement maximale;
- faibles coûts d'entretien;
- l'appareil peut être attribué à des objets antidéflagrants;
- a la capacité de supporter de grandes surcharges au moment de la rotation;
- rendement élevé, supérieur à 90%;
- il existe des contacts électroniques coulissants qui augmentent considérablement la durée de vie et la durée de vie;
- pour un fonctionnement prolongé, il n'y a pas de surchauffe du moteur.
Inconvénients
Malgré le grand nombre d'avantages, le moteur de soupape présente également des inconvénients en fonctionnement:
- contrôle assez compliqué du moteur électrique;
- Le prix relativement élevé de l'appareil dû à l'utilisation dans sa conception du rotor, qui a des aimants permanents coûteux.
Moteur d'inductance de soupape

Le moteur de soupape-inducteur est un dispositif,dans lequel une résistance magnétique de commutation est fournie. Dans celui-ci, la conversion d'énergie se produit en raison d'un changement de l'inductance des enroulements, qui sont situés sur les dents stator prononcées lorsque le rotor magnétique à engrenages se déplace. Le dispositif d'alimentation reçoit d'un convertisseur électrique, en alternance les enroulements du moteur en rigueur à mesure que le rotor se déplace.
Le moteur de soupape-inducteur représenteun système complexe complexe dans lequel les composants qui sont divers dans leur nature physique travaillent ensemble. Pour la conception réussie de tels dispositifs, une connaissance approfondie dans le domaine de la conception des machines et de la mécanique, ainsi que de l'électronique, de l'électromécanique et de la technologie des microprocesseurs est requise.
Un appareil moderne agit commemoteur agissant conjointement avec un convertisseur électronique, qui est réalisé par la technologie intégrée au moyen d'un microprocesseur. Il vous permet d'implémenter un moteur de gestion de la qualité avec le meilleur traitement de puissance.
Propriétés du moteur

De tels appareils ont une dynamique élevée,grande capacité de surcharge et positionnement précis. En raison du fait qu'ils n'ont pas de pièces mobiles, leur utilisation est possible dans un environnement explosif et agressif. Ces moteurs sont également appelés sans collecteur, leur principal avantage, en comparaison avec ceux du collecteur, est la vitesse, qui dépend de la tension de charge du couple de charge. Une autre caractéristique importante est l'absence d'éléments abradables et de frottement, qui commutent les contacts, grâce auxquels la ressource d'utilisation de l'appareil se développe.
Moteurs à courant continu
Tous les moteurs à courant continu peuvent être appeléssans brosse. Ils fonctionnent à partir d'un réseau avec un courant continu. L'ensemble de brosse est prévu pour combiner électriquement les circuits de rotor et de stator. Ce détail est le plus vulnérable et le plus difficile à entretenir et à réparer.
Le moteur DC DC fonctionne surle même principe que tous les dispositifs synchrones de ce type. C'est un système fermé, comprenant un convertisseur de semi-conducteur de puissance, un capteur de position de rotor et un coordinateur.
Vannes à guillotine à courant alternatif
Ces appareils reçoivent leur propre énergie des réseauxcourant alternatif. La vitesse de rotation du rotor et le mouvement du premier harmonique de la force magnétique du stator coïncident complètement. Ce sous-type de moteur peut être utilisé à haute puissance. Ce groupe comprend des dispositifs à clapet et à vanne réactive. Une particularité des dispositifs pas à pas est le déplacement angulaire discret du rotor pendant son fonctionnement. L'alimentation des enroulements est réalisée au moyen de composants semi-conducteurs. Le contrôle du moteur du ventilateur est effectué avec un déplacement successif du rotor, ce qui crée une commutation de sa puissance d'un enroulement à l'autre. Ce dispositif peut être divisé en monophasé, triphasé et multiphasé, le premier pouvant contenir un enroulement de démarrage ou un circuit déphaseur, et être démarré manuellement.
Principe du fonctionnement du moteur synchrone

Le moteur synchrone de la porte fonctionneL'interaction des champs magnétiques du rotor et du stator. Schématiquement, le champ magnétique pendant la rotation peut être représenté par les avantages des mêmes aimants, qui se déplacent avec la vitesse du champ magnétique du stator. Le champ du rotor peut également être représenté comme un aimant permanent qui effectue des rotations de manière synchrone avec le champ du stator. En l'absence d'un couple externe qui est appliqué à l'arbre de l'appareil, les axes coïncident complètement. Les forces d'attraction effectives passent tout le long de l'axe des pôles et peuvent se compenser l'une l'autre. L'angle entre eux est égal à zéro.
Dans le cas où l'arbre de la machine sera affectéle couple de freinage, le rotor se déplace sur le côté avec un retard. Pour cette raison, les forces d'attraction sont divisées en composants qui sont dirigés le long de l'axe des indicateurs plus et perpendiculaire à l'axe des pôles. Si un couple externe est appliqué qui crée une accélération, c'est-à-dire qu'il commence à agir dans le sens de rotation de l'arbre, l'image de l'interaction des champs s'inversera complètement. La direction du déplacement angulaire commence à se transformer à l'opposé, et à cet égard la direction des forces tangentielles et l'effet du moment électromagnétique changent. Dans ce scénario, le moteur freine et l'appareil fonctionne comme un générateur qui convertit l'énergie mécanique fournie à l'arbre en énergie électrique. Ensuite, il est redirigé vers le réseau alimentant le stator.
Quand il n'y a pas d'extérieur,le moment commencera à prendre une position où l'axe des pôles du champ magnétique du stator coïncidera avec l'axe longitudinal. Ce placement correspondra à la résistance d'écoulement minimale dans le stator.
En cas de choc sur l'arbre du freinle rotor est dévié et le champ magnétique du stator se déforme, car le flux a tendance à se fermer à la résistance la plus faible. Pour le déterminer, nous avons besoin de lignes de force, dont la direction dans chacun des points correspondra au mouvement de l'action de la force, de sorte que le changement du champ conduira à l'apparition d'une interaction tangentielle.
Ayant considéré tous ces processus en synchronemoteurs, il est possible de révéler le principe démonstratif de réversibilité de diverses machines, c'est la possibilité de tout appareil électrique pour changer la direction de l'énergie convertie à l'opposé.
Moteur sans balais avec des aimants permanents

Un moteur à aimant permanent est utilisé pour résoudre des tâches industrielles et de défense sérieuses, car un tel dispositif a une grande marge de puissance et d'efficacité.
Ces appareils sont le plus souvent utilisés dans les industries,où une consommation d'énergie relativement faible et de petites dimensions sont requises. Ils peuvent avoir une grande variété de dimensions, sans limitations technologiques. En même temps, les grands appareils ne sont pas tout nouveau, ils produisent souvent des entreprises qui cherchent à surmonter les difficultés économiques qui limitent la portée de ces dispositifs. Ils ont leurs propres avantages, parmi lesquels l'efficacité élevée en raison des pertes dans le rotor et haute densité de puissance. Pour commander les moteurs sans balai, vous avez besoin d'un variateur de fréquence.
Une analyse des coûts et des résultats montre queles dispositifs à aimants permanents sont nettement préférables, en comparaison avec d'autres technologies alternatives. Le plus souvent, ils sont utilisés pour des industries avec un calendrier de travail assez lourd de moteurs marins, dans les industries militaires et de défense et d'autres divisions, dont le nombre augmente continuellement.
Moteur à réaction
Le moteur à réaction ventilé fonctionne avecen utilisant des enroulements biphasés, qui sont installés autour des pôles diamétralement opposés du stator. L'alimentation se déplace vers le rotor en fonction des pôles. Ainsi, son opposition est complètement réduite au minimum.
Un moteur de soupape, créé par soi-même,fournit une vitesse d'entraînement très efficace avec un magnétisme optimisé pour travailler avec l'inverse. Les informations sur l'emplacement du rotor sont utilisées pour contrôler les phases de l'alimentation en tension, ce qui est optimal pour obtenir un couple continu et régulier et un rendement élevé.
Les signaux émis par le turboréacteur se superposent à la phase angulaire insaturée de l'inductance. La résistance minimale des pôles correspond entièrement à l'inductance maximale de l'appareil.
Un moment positif ne peut être obtenu que sicoins, lorsque les indicateurs sont positifs. A basse vitesse, le courant de phase doit nécessairement être limité afin de protéger l'électronique contre les fortes tensions.
Le mécanisme de transformation peut être illustréligne d'énergie réactive. La sphère de puissance est caractérisée par une nourriture qui est transformée en énergie mécanique. En cas de déconnexion soudaine, l'excès ou la force résiduelle revient au stator. Les indicateurs minimaux de l'effet du champ magnétique sur la performance de l'appareil sont sa principale différence par rapport aux appareils similaires.